|
Тетрис на микроконтроллере в Tera Term
Atmel анонсировала линейку «младших» кортексов М0+ семейства SAM D09, SAM D10, SAM D11. Для ознакомления доступны очень дешевые отладки из серии Xplained mini, которые совместимы с шилдами от Arduino. Эти особенности, возможно, вызовут интерес не только среди профессиональных разработчиков, но и у радиолюбителей
В этом году компания Atmel анонсировала линейку «младших» кортексов М0+ семейства SAM D09, SAM D10, SAM D11. Эти не сильно «навороченные» контроллеры имеют низкую цену и небольшие корпуса. Причем в линейке присутствуют камни в легкопаяемых корпусах SOIC-14 и SOIC-20. Для ознакомления с возможностями контроллера доступны очень дешевые отладки из серии Xplained mini, которые совместимы с шилдами от Arduino. Эти особенности, возможно, вызовут интерес не только среди профессиональных разработчиков, но и у радиолюбителей.
Когда отладки попали к нам в руки, захотелось вместо «серьёзной» демонстрационной задачи в честь приближающегося Нового года сделать что-нибудь забавное и креативное. Мы поскребли по сусекам и нашли старенький проектик — тетрис на MEGA168 через терминалку и решили портировать его на новый камень и представить общественности. Практического смысла в этом никакого, что называется Just for fun. Кому интересны подробности, прошу под кат.
Кратко о новых микроконтроллерах
- SAM D09 — младший представитель семейства SAM D. Имеет 8К или 16К флеша и 4К SRAM. Варианты корпусов QFN-24 и SOIC-14. На борту DMA и Event system. 2 SERCOM — универсальных коммуникационных модулей, которые могут конфигурироваться как USART, SPI или I2C. 5-ти или 10-ти канальный 12-ти битный АЦП.
- SAM D10 — апгрейд D09 в части добавления дополнительных таймеров, аналогового компаратора, ЦАП и контроллера сенсорных кнопок, а так же дополнительного SERCOM для некоторых модификаций. Варианты корпусов QFN-24, SOIC-14, SOIC-20.
- SAM D11 — тот же D10, но с добавлением Full-Speed USB Device.

Внешний вид отладочной платы. Программатор на борту, подключение через разъем Micro USB.
Теперь про сам тетрис
Работа тетриса основана на нескольких базовых принципах:
- общение с терминалкой осуществляется по протоколу VT100,
- обновление картинки происходит по таймеру,
- любая фигура вписывается в квадрат определенных размеров (4 на 4 символа).
Тетрис использует три команды из протокола VT100: очистка экрана, перемещение курсора в начало и сделать курсор невидимым.
Для работы по этому протоколу можно использовать терминалку Tera term, например.
Для управления используются 5 клавиш-букв клавиатуры:
- n – начать новую игру,
- w или space – повернуть фигуру,
- s – уронить фигуру,
- d – переместить вправо,
- a – переместить влево.
В коде можно легко переназначить клавиши управления на другие
switch (c)
{
case 'w':
case ' ':
tetris_rotate();
break;
case 's':
tetris_gravity();
break;
case 'd':
tetris_move_right();
break;
case 'a':
tetris_move_left();
break;
default: break;
}
if (c == 'n')
{
c=0;
srand(tick);
is_running = true;
terminal_cursor_off();
terminal_clear();
tetris_init();
tetris_new_block();
terminal_cursor_home();
tetris_print();
}
Скорость игры устанавливается таймером. Для более опытных игроков можно задать «тиканье» быстрее, тогда и фигуры будут падать быстрее.
Конечно же, подсчитываются очки: за каждую исчезнувшую строку добавляется 100 очков. За каждую следующую «исчезнувшую» одновременно с первой, добавляется в два раза больше очков, чем за предыдущую.
Портируем с mega на samd10
Из периферии контролера нам нужен SERCOM в режиме UART для непосредственной передачи фигурок и картинки, и таймер для отсчета времени обновления картинки.
Вместо милой сердцу любого программиста 8-битных контроллеров настройки UART битами в регистрах:
static void board_init(void)
{
DDRD &= ~USART_RX_PIN_bm;
DDRD |= USART_TX_PIN_bm;
PORTD |= USART_TX_PIN_bm;
PORTB |= SW_PIN_bm;
DDRB &= ~SW_PIN_bm;
PRR = (1 << PRTWI) | (1 << PRTIM2) | (1 << PRTIM0) | (1 << PRSPI) | (1 << PRADC);
}
конфигурируем sercom для работы в режиме uart, не забывая разрешить прерывания и callback по приему символа.
Конфигурация Sercom в режиме uart
static void configure_console(void)
{
struct usart_config usart_conf;
usart_get_config_defaults(&usart_conf);
usart_conf.mux_setting = CONF_STDIO_MUX_SETTING;
usart_conf.pinmux_pad0 = CONF_STDIO_PINMUX_PAD0;
usart_conf.pinmux_pad1 = CONF_STDIO_PINMUX_PAD1;
usart_conf.pinmux_pad2 = CONF_STDIO_PINMUX_PAD2;
usart_conf.pinmux_pad3 = CONF_STDIO_PINMUX_PAD3;
usart_conf.baudrate = CONF_STDIO_BAUDRATE;
stdio_serial_init(&cdc_uart_module, CONF_STDIO_USART_MODULE, &usart_conf);
}
enum status_code usart_enable_rx_interrupt( struct usart_module *const module, uint8_t *rx_data)
{
Assert(module);
Assert(rx_data);
SercomUsart *const usart_hw = &(module->hw->USART);
module->rx_buffer_ptr = rx_data;
usart_hw->INTENSET.reg = SERCOM_USART_INTFLAG_RXC;
return STATUS_OK;
}
void configure_usart_callbacks(void)
{
usart_register_callback(&cdc_uart_module, USART_RX_callback, USART_CALLBACK_BUFFER_RECEIVED);
usart_enable_callback(&cdc_uart_module, USART_CALLBACK_BUFFER_RECEIVED);
}
В исходном коде для меги данные по uart принимались с помощью putc, для samd10 сделаем проще: пусть просто по прерыванию каждый полученный байт сваливается в определенную переменную. Это решение не претендует на правильность и безопасность, оно для простоты перехода и ускорения его.
Подробно про то, как победить порой слишком «умную» ASF для приема одного байта по прерываниям, мы писали в нашей статье на сайте we.easyelectronics.ru.
Перейдем к таймерам.
Код для меги:
void init_timer(void)
{
TIFR1 = 1 << OCF1A;
TIMSK1 = 1 << OCIE1A;
OCR1A = TIMER_TOP_VALUE;
TCCR1B = (1 << WGM12) | (1 << CS12) | (1 << CS10);
}
ISR(TIMER1_COMPA_vect, ISR_BLOCK)
{
++tick;
iterate_game = true;
}
И соответствующий код для samd10
static void configure_tc(void)
{
struct tc_config config_tc;
tc_get_config_defaults(&config_tc);
config_tc.counter_size = TC_COUNTER_SIZE_16BIT;
config_tc.wave_generation = TC_WAVE_GENERATION_MATCH_FREQ;
config_tc.counter_16_bit.compare_capture_channel[0] = 2000;
config_tc.clock_prescaler=TC_CLOCK_PRESCALER_DIV1024;
tc_init(&tc_instance, CONF_TC_INSTANCE, &config_tc);
tc_enable(&tc_instance);
}
static void configure_tc_callbacks(void)
{
tc_register_callback(&tc_instance, tc_callback_to_counter, TC_CALLBACK_CC_CHANNEL0);
tc_enable_callback(&tc_instance, TC_CALLBACK_CC_CHANNEL0);
}
static void tc_callback_to_counter( struct tc_module *const module_inst)
{
++tick;
iterate_game = true;
}
Вот и все. Весь остальной код для обработки движения фигур и всей остальной логики остается таким же.
Полностью проект для samd 10 лежит на github.
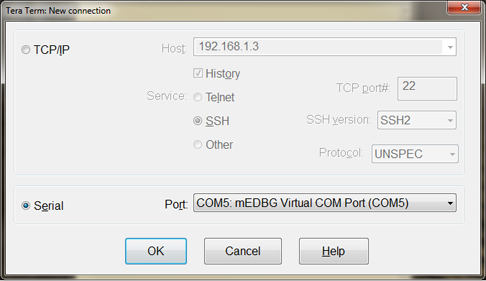
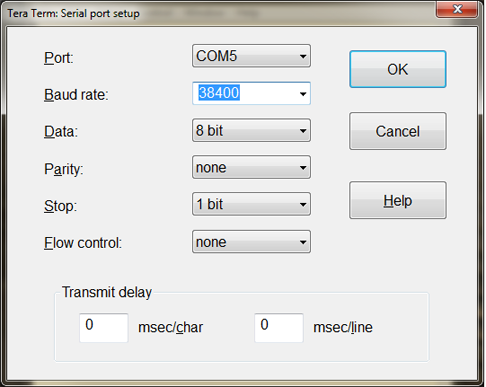
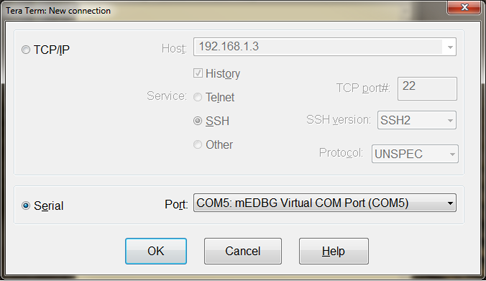
Настройки для Tera Term:
ПОСМОТРЕТЬ КЛИП
Стоимость отладочной платы ATSAMD10-XMINI составляет 450 рублей.
версия для печати
|
 |